OTC Daihen Arc Welding Robot FD-B6L
| FD-B6L | |||||||||
| Structure | Vertical articulated type | ||||||||
| Number of Axes | 6 | ||||||||
| Max. Payload Capacity | 6 kg | ||||||||
| Positional Repeatabilty | ±0.08 mm (note1) | ||||||||
| Drive System | AC Servomotor | ||||||||
| Drive Capacity | 4832 W | ||||||||
| Position Feedback | Absolute Encoder | ||||||||
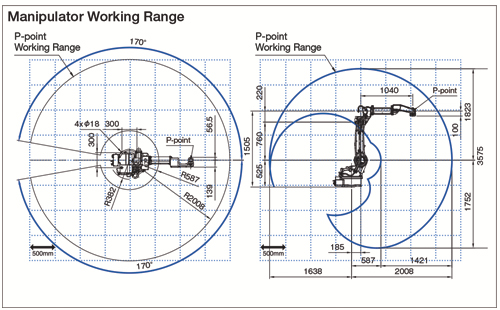
| Working Range | Arm | J1 (Rotation) | ±170° (±50°) (Note 2) | ||||||
| J2 (Lower Arms) | -155°~+100° (Note 3) | ||||||||
| J3 (Upper Arms) | -170°~+190° | ||||||||
| Wrist | J4 (Swing) | ±155° (±170°) (Note 4) | |||||||
| J5 (Bending) | -45° ~+225° (Note 5) | ||||||||
| J6 (Twist) | ±205° (±360°) (Note 4, 5) | ||||||||
| Maximum Speed | Arm | J1 (Rotation) | 3.40 rad/s {240°/s} (3.32 rad/s {190°/s} ) (Note 2) | ||||||
| J2 (Lower Arms) | 3.49 rad/s {200°/s} | ||||||||
| J3 (Upper Arms) | 3.49 rad/s {200°/s} | ||||||||
| Wrist | J4 (Swing) | 7.50 rad/s {430°/s} | |||||||
| J5 (Bending) | 7.50 rad/s {430°/s} | ||||||||
| J6 (Twist) | 11.00 rad/s {630°/s} | ||||||||
| Wrist Allowable Load | Allowable Moment | J4 (Swing) | 10.5 N·m | ||||||
| J5 (Bending) | 10.5 N·m | ||||||||
| J6 (Twist) | 5.9 N·m | ||||||||
| Allowable Moment of Inertia | J4 (Swing) | 0.28 kg·m² | |||||||
| J5 (Bending) | 0.28 kg·m² | ||||||||
| J6 (Twist) | 0.06 kg·m² | ||||||||
| Arm Cross-sectional Area | 6.37 m² x 340° | ||||||||
| Ambient Condition | Temp : 0 to 45℃, Hmd:20 to 80% RH (No Condensation) | ||||||||
| Mass ( weight ) | 278 kg | ||||||||
| Upper Arm Payload Capacity | 20 kg (Note 6) | ||||||||
| Installation Type | Floor, wall, or ceiling | ||||||||
| Paint Color | White (Munsell notation 10GY 9/1) | ||||||||